Research:Robotics Group
Window Cleaning Robot
Abstract
The window cleaning robot is useful because the winodow cleaning by humans is expensive and dangerous. However, it is not put to practical use because gravity makes control difficult. To solve it, there are some researches such as attitude control methods. In most cases its objective is only attitude and there is no consideration for position. So if once position error is caused, robot cannot follow the target path. In this research, we have proposed trajectory tracking control of the window cleaning robot and realized gravity compensation.
-
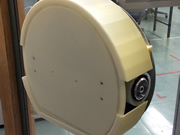
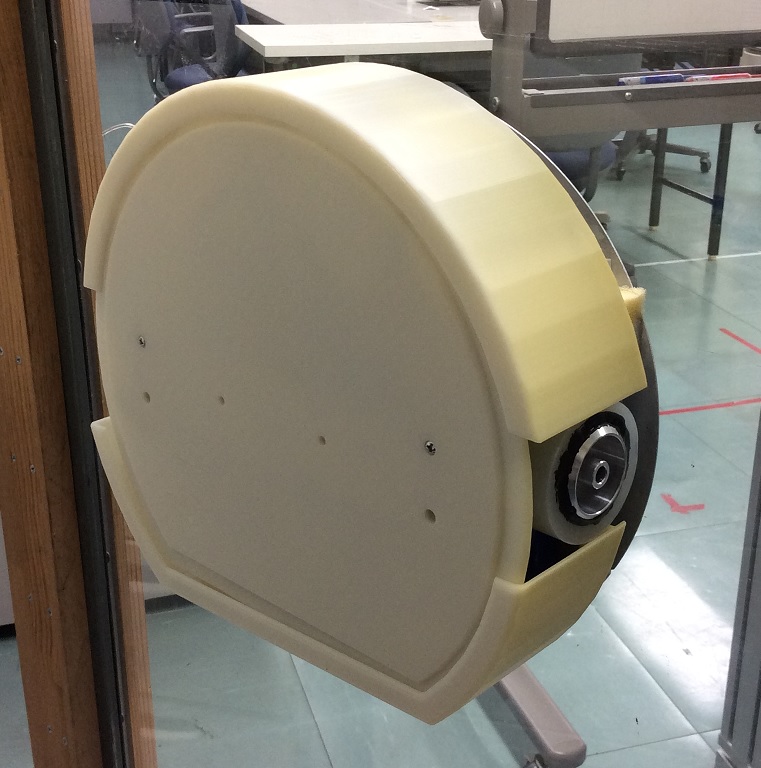
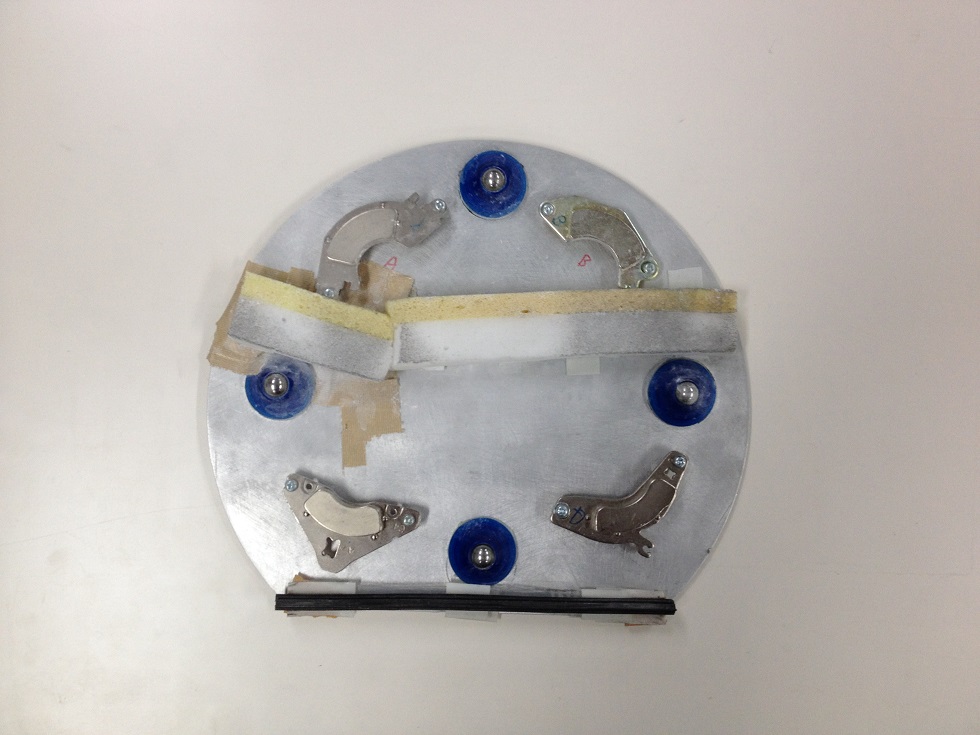
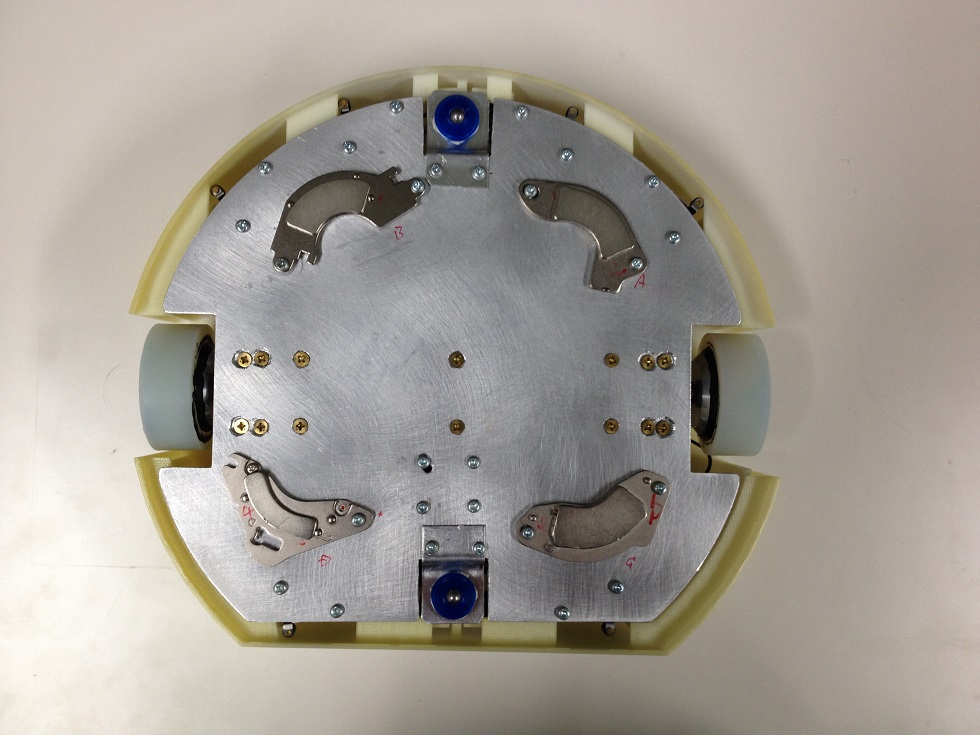
Prototype of window cleaning robot
-

Driving mechanism side
-
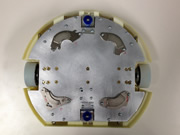
Cleaning mechanism side
Robot for the Wiring Task Under the Roof
Under Construction
Stacking Crane
Under Construction
Floor Cleaning Robot
Under Construction
Parallel Wire Robot
Abstract
We study a parallel wire mechanism where an end-effectors of the mechanism is suspended by multiple wires. The mechanism enables not only three-dimensional positioning but also three-dimensional orientating of the end-effectors, unlike typical wire suspension type mechanism such as an overhead crane. We especially study an incompletely restrained parallel wire mechanism, where three wires suspend one end-effecter. The position and orientation of the end-effecter are controlled by three trolleys' positions and three wires' length. We are proposing an anti-sway control method for the suspended object by this mechanism based on an inverse dynamics calculation for the mechanism.
-

Example of wire-suspension mechanism (container crane)
-

Parallel wire robot developed in our lab.


Papers
- Motoji Yamamoto, Noritaka Yanai, and Akira Mohri, "Trajectory Control of Incompletely Restrained Parallel-Wire-Suspended Mechanism Based on Inverse Dynamics," IEEE Trans. on Robotics, Vol.20, No.5, 2004.
Mobile Robot and Mobile Manipulator
Abstract
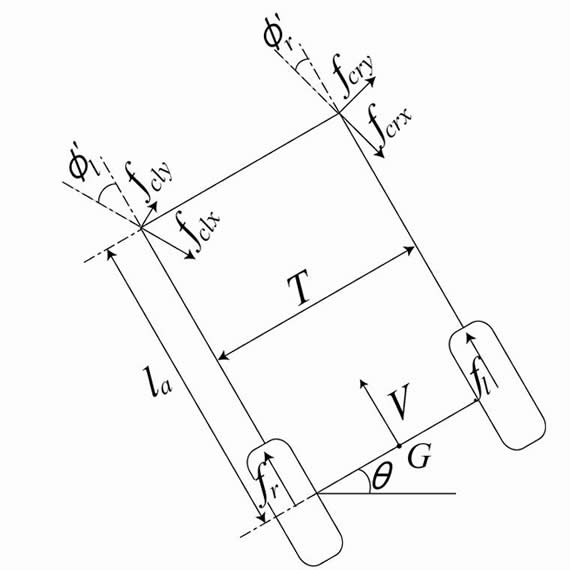
Mobile robots and mobile manipulator, wheeled platform and wheelchair, are used the various situations to carry objects and to move the people who have handicap. So mobile robot and mobile manipulator have many role. Additionally the autonomous mobile robot is developed to guard buildings or to guide the station.
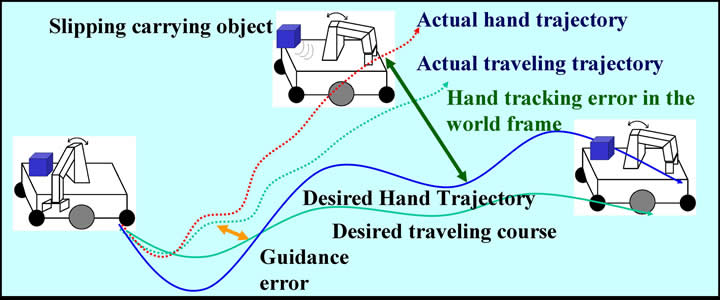
We propose the some control method and model. One is the trajectory tracking control method for mobile robot, another is the model of wheelchair type robot to examine the effects of casters and slip angles. For the future, we propose the control method including the effects of casters and slips to travel safety.
-
Position and orientation errors of mobile manipulator
-
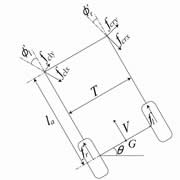
Model of wheelchair
-

Electrical wheelchair

Papers
- T. Ikeda, M. Kuroda, M. Yamamoto, "Effects of Cornering Forces by Casters and Slip Angles on Wheelchair Type Mobile Robot," Proceedings of 2008 JSME Conference on Robotics and Mechatronics, CD-ROM, 2P2-D17, 2008.(in Japanese)
- Y. Yazaki, T. Ikeda, M. Takeuchi, M. Minami, "Fastest Guidance Control with Acceleration Restriction of PWS Mobile Robot," Journal of the Robotics Society of Japan, Vol. 25, No. 4, pp. 535-544, 2007.(in Japanese)
- M. Minami, T. Ikeda, M. Takeuchi, "Dynamical Model of Mobile Robot Including Slipping of Carrying Objects," International Journal of Innovative Computing, Information and Control, Vol. 3, No. 2, pp. 353-369, 2007
- T. Ikeda, M. Minami, "Proposal and Evaluation of Guidance Control Method of Mobile Manipulator," Journal of the Robotics Society of Japan, Vol. 25, No. 2, pp. 259-266, 2007.(in Japanese)
Training Simulator for Intraoral Radiography
Abstract
Intraoral radiography is basically used in order to diagnose patients' dental disease.
Recently, it is reported that this radiographic skill of dental student of both domestic and overseas is declining. The dental students use an actual radiographic system in their training time, so that the use of x-ray radiation, consumption of film, and photofinishing time narrow the amount of their training before graduation.
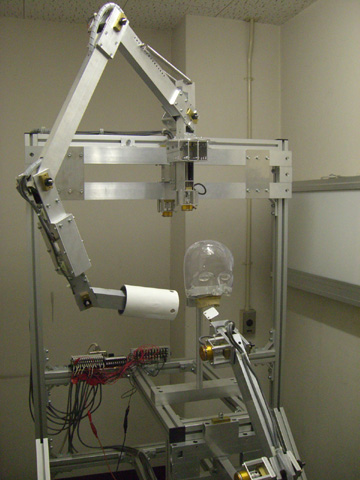
We have developed a training system for intraoral radiography based on virtual reality technique. In our training system, virtual reality technique is adopted to show the computed image of intraoral radiogram on the computer display. Both position of an indicator cone, which radiates x-ray, and film are steadied by the multi-links arms of the system.
-

Conventional training environment
-

Developed simulator
-

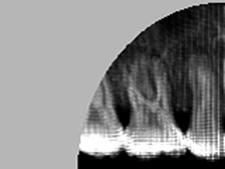
Actural X-ray image
-
Simulated X-ray image

Papers
- Y. Fujii, T. Tokuyasu, M. Yamamoto, K. Okamura, K. Yoshiura, Development of an intraoral radiographic training simulator, International Journal of Computer Assisted Radiography and Surgery, pp.539
- Tatsushi Tokuyasu, Yusuke Fujii, Motoji Yamamoto, Kazutoshi Okamura, Kazunori Yoshiura, A training simulator for intraoral radiography, Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.149-154
Distinguish Materials for Automatic Dental Drilling
Abstract
In Japan, many people have a cavity. The carious treatment often requires long time.
On the other hand, a doctor drills the carious area by freehand and the drilling operation requires very high skill.
If the operation could be mechanized, short treatment time and high accuracy drilling could be realized.
However, it is difficult to realize the machine how much the caries should be removed. Its diagnosis is depended on the doctor's experience or sense.
To solve this problem, we suggest the new carious determination method based on the vibration induced by the dental drilling.
-

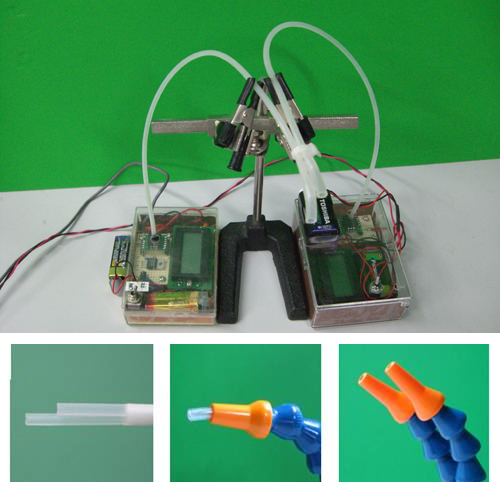
Teeth and simulated drill
-
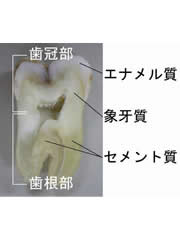
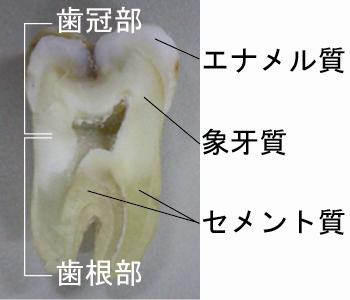
Structure of tooth

Interface of Respiratory Pressure for Severely Disabled Person
Abstract
Severely handicapped often uses respiratory pressure for an input device to control various instruments. The input device is typically ON/OFF type for the control of the equipments. Considering the application of motored wheelchair, the ON/OFF type interface is not desirable. The control of motored wheelchair needs preciseness and quickness for safe operation. A new input device using respiratory pressure is proposed for such purpose. In this research, we examine the basic performances of human respiratory pressure regulation as an analogue input method. Then possibility of two-dimensional analogue input device is discussed. Practical application of proposed interface device, we control the motored wheelchair by using respiratory pressure input.
-

Interface of breath pressure
-

Travering simulation
-

Experiment of electrical wheelchair


Papers
- M. Yamamoto, T. Ikeda, Y. Sasaki, F. Y. Cao, "Analogue Input Interface for the Operation of Motored Wheelchair Using Respiratory Pressure for Severely Disabled Person," Transactions of the Japan Society of Mechanical Engineers, Series C, Vol. 75, No. 751, pp. 703-709, 2009. (in Japanese)
- M. Yamamoto, T. Ikeda, Y. Sasaki, "Real-Time Analog Input Device Using Breath Pressure for the Operation of Powered Wheelchair," 2008 IEEE International Conference on Robotics and Automation(ICRA), pp. 3914-3919, 2008.
- T. Ikeda, M. Yamamoto, Y. Sasaki, "Operation of Electrical Wheelchair using Device of Expiratory Pressure," Proceedings of the 25th Annual Conference of the Robotics Society of Japan, 3J27, 2007. (in Japanese)
- F. Cao, M. Yamamoto, "Real-Time Analogue Input Device Using Breath Pressure for the Operation of Motored Wheel Chair," Proceedings of the 12th Robotics Symposia, 1B4, pp. 52-57, 2007. (in Japanese)