Research
Human's Controlled Performances
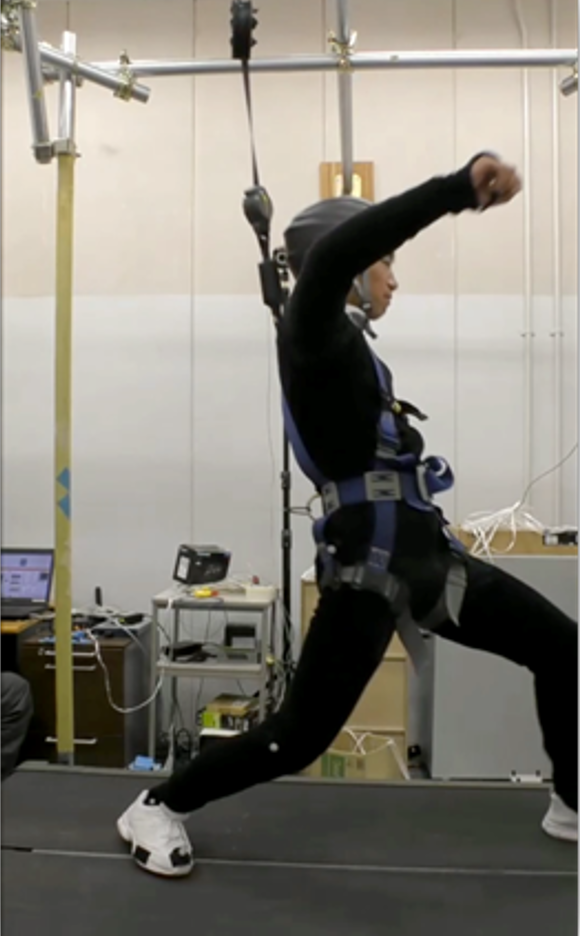
Recovery Motion Based Fall Risk Evaluation System during Slipping Fall
In this study, we analyze fall avoidance strategies with experiments during the applied stimulation of the slipping fall. The objective is a verification whether a fall avoidance movement in a single subject will be changed or not changed by the difference of experimental conditions. There are two conditions in these experiments. One is restrained of subject's movement by a string. The other is increased a intensity of the applying stimulus in experiments. In restrained the condition, caused by limited lowly angle of the shoulder joint and the hip joint, a subject cannot swing a upper limb and a lower limb like a usual in the forward and backward direction. In the condition of the stimulus intensity, caused by control an acceleration of one side belt in split-belt treadmill, a stimulus intensity can be increased or decreased. As a result, in restrained the condition caused by limited lowly angle of the shoulder joint and the hip joint, one subject had fallen in the first half of the trial, but could avoid fall in the latter half of the trial. Therefore, it was found that even if the subject had fallen initially in a condition, the subject may have changed the fall avoidance strategy finally in order to avoid a fall in the same condition.
-
Fall Risk Evaluation
Evaluation of Human Atanding Ability
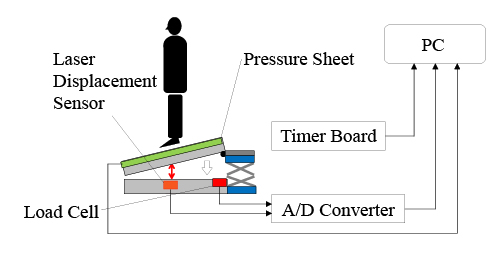
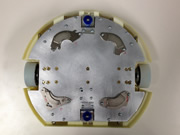
We study the basic human standing stabilization ability for the prevention of falls in the elderly. We build a swash plate system for applying disturbances to the subject and propose a method for quantitative evaluation of standing stability using a system identification method.
-

Evaluation of Human Atanding Ability
-
Experimental Setup
Precise Control by FES
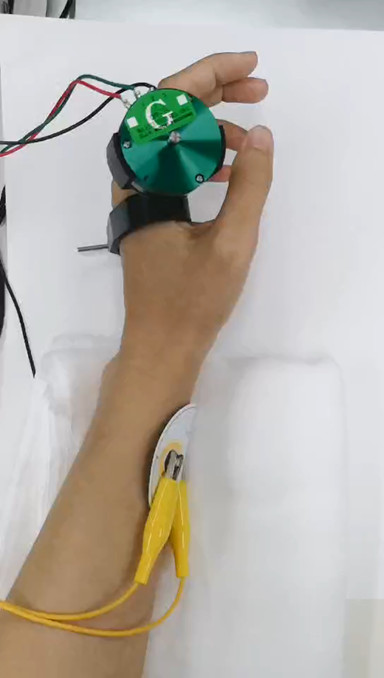
FES (Functional Electrical Stimulation) is the intentional contraction of specific muscles by applying electrical stimulation to the skin surface. This method is used for rehabilitation of joint movements and to reproduce lost motor functions. This research aims to realize precise motions of human joint by FES.
-
FES
Healthcare Robot
Kinetic Analysis of Pushing Force in Wheelchair Operation by Caregiver
Transportation using wheelchair is one of the most frequent transportation methods at home, medical and nursing care facilities. Wheelchairs are designed to be operable by passengers but often require assistance, and wheelchair assistance is a heavy burden. In order to quantitatively evaluate the physical burden of the caregiver when operating the wheelchair, it is necessary to analyze the characteristics of the force applied to the wheelchair when the caregiver operates the wheelchair. On the other hand, the optimal posture index of the caregiver when operating a wheelchair is not known, and the operation posture differs depending on the caregiver. Therefore, in this study, we compare the posture and the mechanical characteristics of multiple caregivers to operate a wheelchair, and consider the posture of the caregiver.
-

Wheelchair Operation by Caregiver
Motion Control using Human Illusions and Reflexes
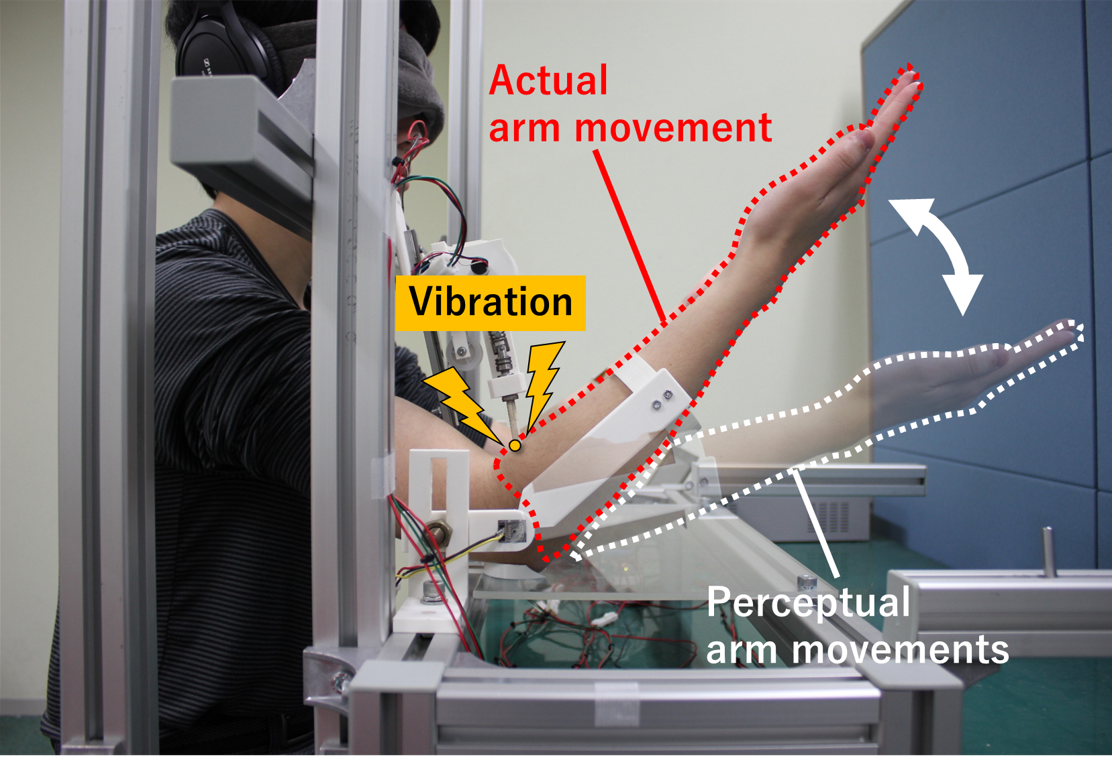
Proprioception is the sense of the locomotion, movement and action of body parts of a human. It is known that the illusory proprioceptive sense can be generated by vibration stimulation given to human’s muscle. Recently, we found that a human motion becomes different from human’s intended motion when vibration stimulation is given to a muscle during movement. Furthermore, the amount of change in human motion can be controlled by changing some parameters of vibration. This technique can be applied for assistive technology for elderly and handicapped people, rehabilitation and VR.
-
Vibration Stimulation
The device that a surgeon can instruct a task on the monitor without using medical doctor’s hand
In situations such as endoscopic surgeries, a leader cannot use their hands to instruct the other surgeons to perform a task on the monitor because he/she must use both hands to control the surgical equipment. Therefore, an assisting pointing device apparatus that directly measures the behavior of users and is not based on hands is specifically needed. To tackle this problem, we built a pointing device that measures the tilt angle of a user’s head by gyro and acceleration sensors.
-

pointing device
Soft Robotics
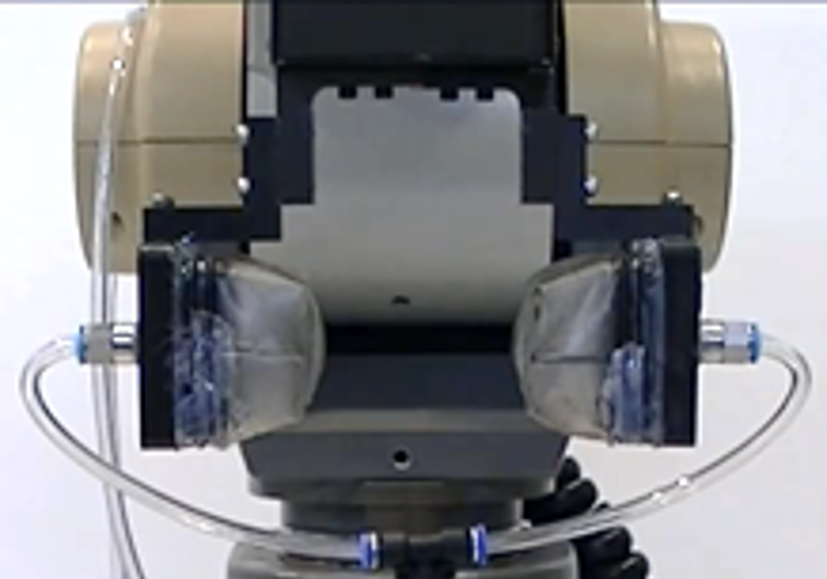
Stable Grasping by Passively Deformable Soft Finger
We study a robot hand for grasping soft foods such as tofu and jelly without damaging them and its control method. By controlling the air volume and internal pressure of the air-filled pouch-shaped hand, the shape and softness of the hand surface can be controlled, which allow to grasp and handle objects with very low load.
-
Passively Deformable Soft Finger
Woodpecker-inspired Arm
Inspired by the characteristics of woodpeckers, we designed a robot manipulator that can substantially extend its length and bend its shape in 2D space. This behavior is enabled by a backbone consisting of a chain of rigid joints and two flexible rack gears. The joints increase the payload by structurally supporting the robot. The proposed structure is 4.7 times stronger in vertical bending and 6.2 times stronger in torsion than without rigid links. Feeding the rack gears at the same and different speeds allows the robot to elongate and bend, respectively.
Soft Robot using Flexible Linear Motor
We designed a new motion mechanism using the tubular structure of a shower hose to mimic the useful qualities of soft organisms, namely, to be lightweight, flexible and extendable. The flexible tube with a metal plate with an S shaped profile spirally wound is the same kind as found in household use. A gear engages with the helical groove on the surface of the tube. The flexible tube moves back and forth by rotational motion. The robot has a body composed of three flexible tubes that are connected in parallel. The body can bend or elongate by controlling the length of each flexible tube fed by the gear..
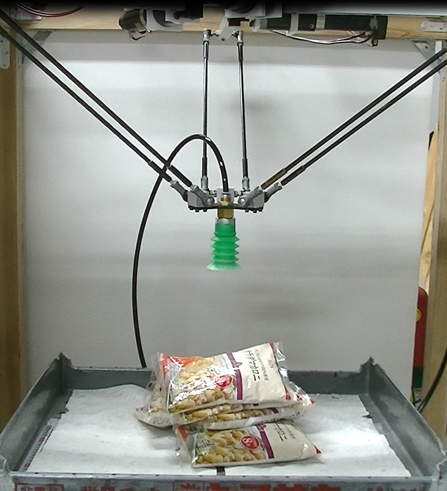
Soft Objects Grasping by Ultra-high Speed Parallel Link
Parallel link robots can operate at high speeds due to their lightweight moving parts, and have recently been widely used in factories for picking operations of foodstuffs. However, when such robots operate at high speed, a large force is generated at the mounting frame, and the vibration of the frame reduces the accuracy of the robot's movement. In this research, we investigate a vibration suppression control method for parallel link robots by taking into account their dynamics.
-
Parallel Link
Others
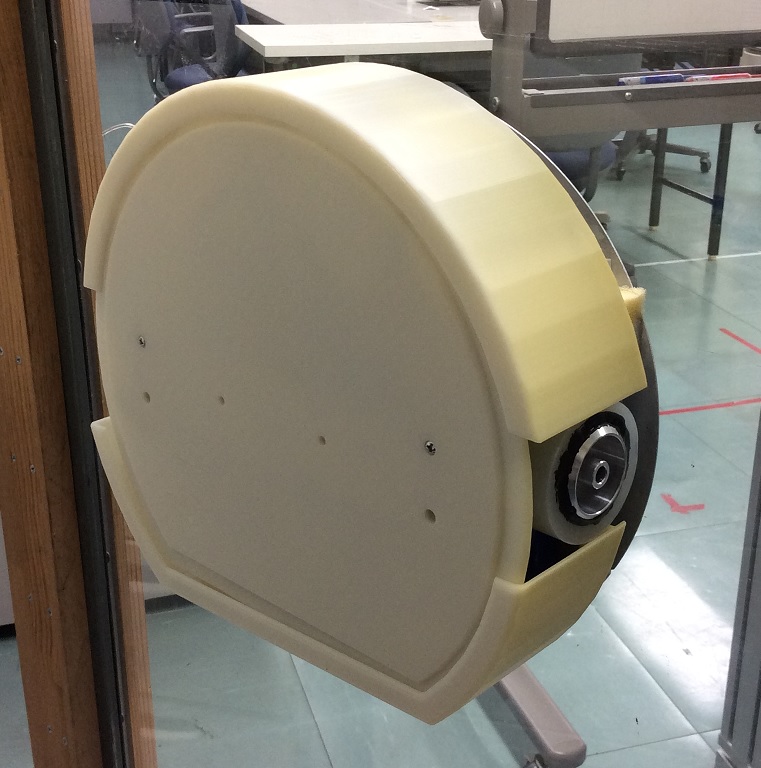
Window Cleaning Robot
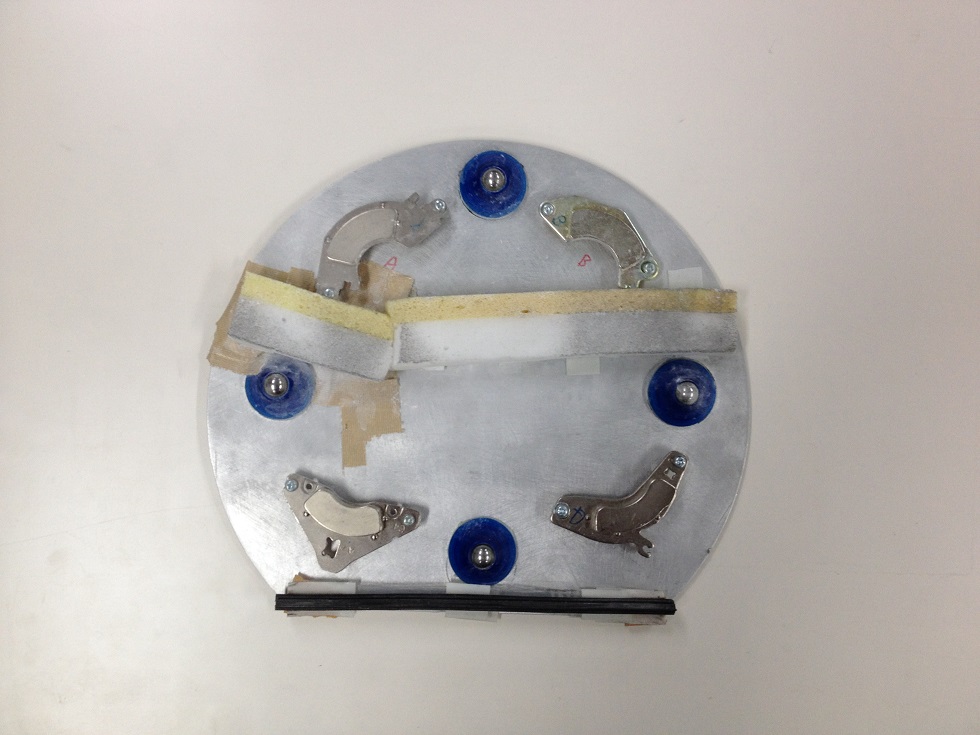
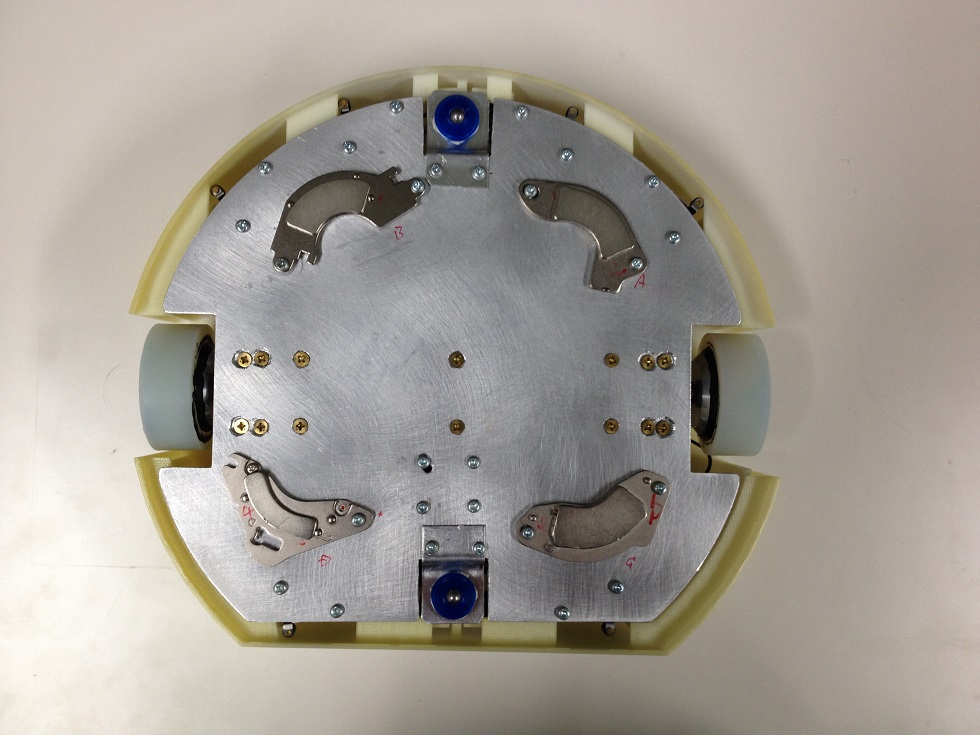
The window cleaning robot is useful because the winodow cleaning by humans is expensive and dangerous. However, it is not put to practical use because gravity makes control difficult. To solve it, there are some researches such as attitude control methods. In most cases its objective is only attitude and there is no consideration for position. So if once position error is caused, robot cannot follow the target path. In this research, we have proposed trajectory tracking control of the window cleaning robot and realized gravity compensation.
-
Prototype of window cleaning robot
-

Driving mechanism side
-
Cleaning mechanism side
Click here to previous page