研究紹介
ヒトの制御性能評価
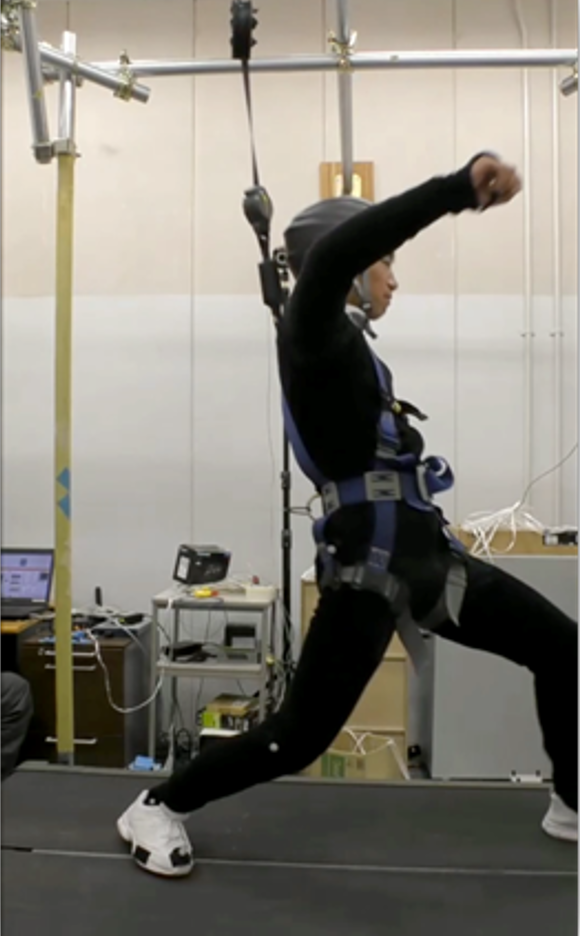
滑り転倒リスク評価
本研究では,転倒のリスクを安全かつ事前に提示可能なシステムの開発を目指して, 屋外での摩擦が異なる路面状態での滑り転倒現象を再現したトレッドミルの歩行システムの開発と, 実際の転倒回避動作に基づいた新たな転倒リスクの評価指標の確立を行う.より自然な転倒現象を 再現するために,ヒトの自然な歩行に追従して回転するトレッドミルの開発と,滑り動作特性と 屋外の路面状態の物理特性を考慮したトレッドミルの制御手法を開発する.また,関節の可動域を 制限した模擬高齢者対象に滑り転倒実験を行い,転倒回避能力の定量化を行い,従来と比べて,実際 の転倒回避動作に基づいて,より即した転倒リスクの評価を実現する.
-
転倒リスク評価
立位安定性評価
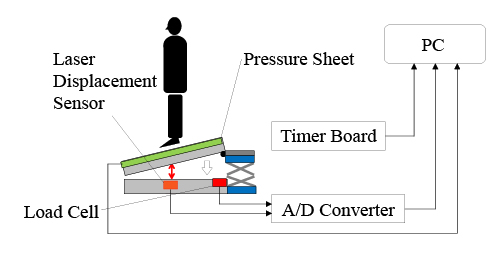
高齢者の転倒事故は社会的問題となっていますが,これに関連して より基本的なヒト立位安定化能力に関する研究をおこなっています. 我々は特に斜板落下式の力学的外乱印加装置を用い,またシステム同定手法 により立位安定性を定量評価する手法を開発しています.
-

立位安定性評価
-
模式図
FESによる精密制御
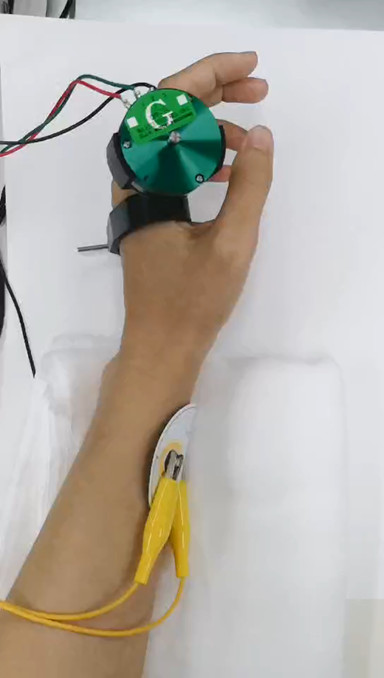
FES (Functional Electrical Stimulation)=機能的電気刺激とは電気的な刺激を皮膚表面に与えることで 特定のもしくは複数の筋肉を意図的に収縮動作させることです.これは関節動作のリハビリテーションや 消失した運動機能を再現する手法として用いられています.この研究ではFESによりヒト関節動作の他動的な 精密動作の実現を目指しています.
-
FES
生活・介護・手術支援ロボット
車いす介護者の負担評価
近年の高齢化に伴い,介助は我々の生活の身近にあり,その負担低減が強く望まれている.介助の中でも, 移動介助は生活に密接に関わるものであり,特に介助者が車いすを押す動作では,熟練者と初心者ではその 疲労などの身体負担が大きく異なり,初心者における負担軽減は急務である.しかし,熟練者と初心者間に おける車いす介助動作の力学特性の違いについては十分に議論されていないため,熟練者がもつ負担低減に 効果的な因子が明らかにされておらず,初心者に教示すべき,負担低減に効果的な車いすの介助動作はいまだ 確立されていない.本研究の目的は,車いす介助における熟練者の車いす操作の工学的解明とその操作を規範 とした介助力学モデルの構築,また,そのモデルに基づいた車いす介助訓練システムの開発である.
-

車いす負担評価
人間の錯覚・反射を利用した動作変更
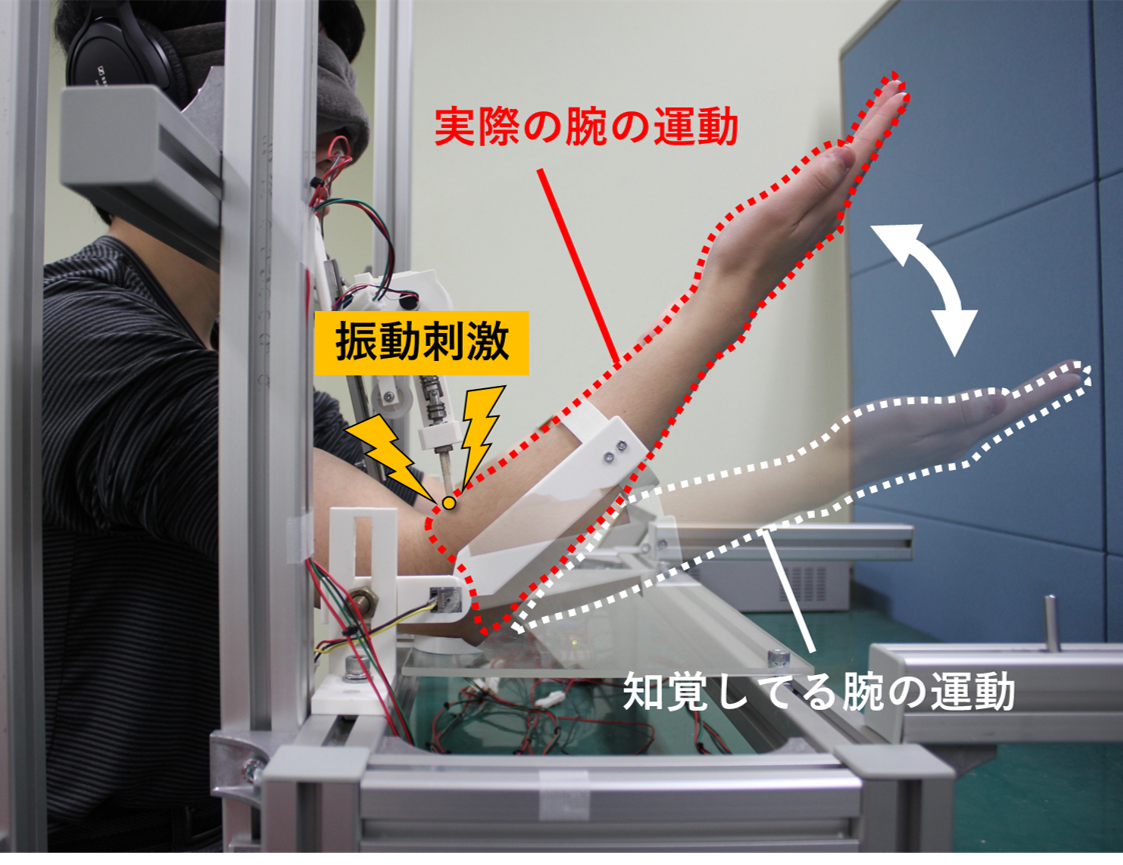
人間は目を閉じていても,自身の体の位置や運動を知覚することができます.これは人間の固有受容感覚 (運動感覚・位置感覚など)によるものです.一方,この固有受容感覚は,人間の筋肉に対して皮膚表面から 機械的な振動刺激を与えるという単純な刺激により,錯覚として生起させることが可能です.我々はこの固有 受容に関する錯覚現象と,錯覚生起の前に発生する筋反射現象を利用して,人間の動作を意図する動作と異なった 動作へと変更することが可能であること,さらに,その動作変更量を制御可能であることを発見しました.この技術は, 人間の動作を適切な動作へと自動的に変更する作業アシストや,リハビリテーション,バーチャルリアリティなどへの応用が見込まれます.
-
振動刺激実験
内視鏡手術下中のためのポインティングデバイス
内視鏡下手術において術者の指示がスムーズに伝わることを目的とした,手を使わずにモニター上を指示できる ポインティングデバイスの開発を行う.具体的には,加速度センサとジャイロセンサで計測された頭部の姿勢に基づいて ポインタの移動方向を決定する.本研究では,素早い移動,正確な停止,精密ななぞり動作を実現するために,ヒトの動作特性を 考慮した手法として,頭部傾斜時の力学モデルの構築とそれに基づいたデバイスの制御手法を提案する.最終評価では,それぞれの 評価(素早い移動ではマウス操作と同等の時間,正確な停止では要手術の腫瘍の大きさ以下の誤差,精密ななぞり動作では手術で用いる 鉗子径以下の誤差)に対して指標を達成できたか検証実験より有効性を確認する.
-

ポインティングデバイス
ソフトロボティクス
食品等軟弱ワークの低負荷把持
豆腐やゼリーなど軟弱な食品を傷めることなく把持・ハンドリングするためのハンドとその制御 手法を検討しています.空気を充てんした袋状のハンドの空気量と内圧を制御することで ハンド表面の形状や柔らかさを制御し,食品を超低負荷で把持ハンドリングすることが可能です.
-
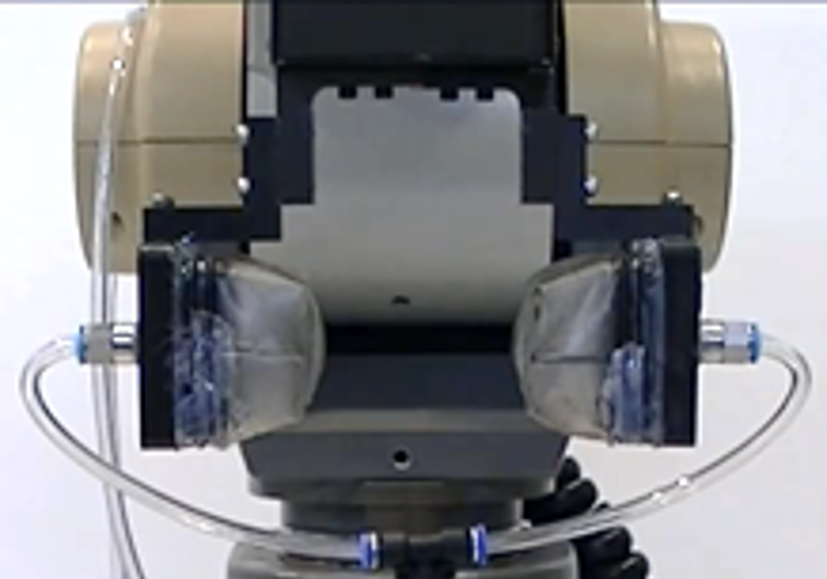
低負荷把持
キツツキを模倣したロボットアーム
キツツキの舌の構造を真似て,自在に伸縮屈曲できるロボットアームを開発しました. 体を小さく丸めて収納したり,重い荷物を把持したりできます.
柔軟直動モータを使ったロボット
柔軟な駆動軸を直動させるモータを用いたソフトロボットの開発を行う. 空圧やSMAなどの伝統的なソフトアクチュエータに比べて,ストローク・制御性・携帯性の点で優れる. 開発した動作機構は,柔軟な金属チューブをラックアンドピニオンの原理で動作させる.
超高速パラレルリンクによる柔軟物把持
パラレルリンクロボット は可動部機構が軽量なことから高速動作可能であり,近年,工場において 部品や食品のピッキング動作などに広く用いられるようになってきました.しかしながらこのロボットが 高速動作するときは取り付け部に大きな力が生じ,取り付けフレームが振動することで動作精度が低下 することが問題となっています.この研究では パラレルリンクロボットの動力学を考慮した振動抑制 制御手法を検討しています.
-
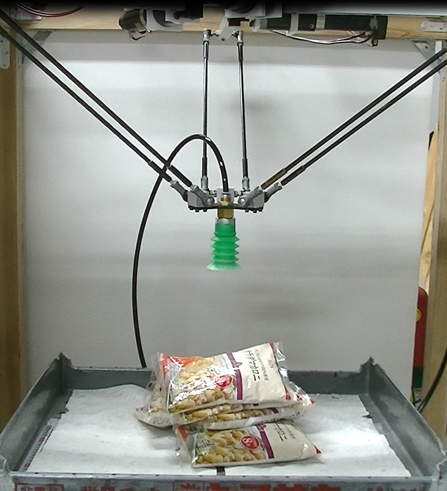
パラレルリンク
その他
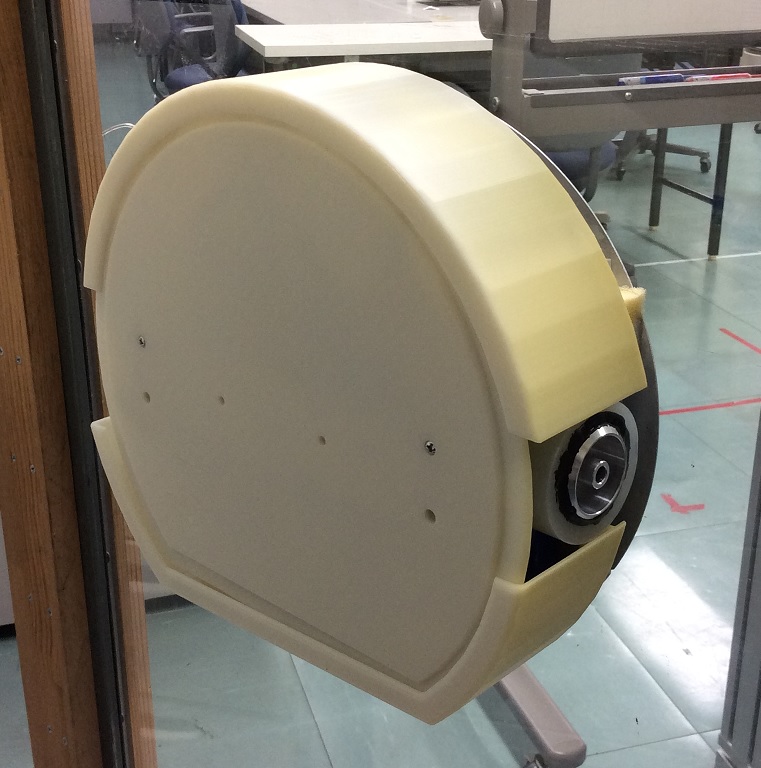
ガラス窓清掃ロボット
ガラス窓1枚を自動的に掃除するロボットを研究開発しています.ガラス面の汚れを検出し,不十分な 掃除とならないよう,またガラス全面を清掃できるように自動的に移動清掃おこないます. 掃除終了後は最初の取り付け位置に戻ります
-
試作ロボット
-

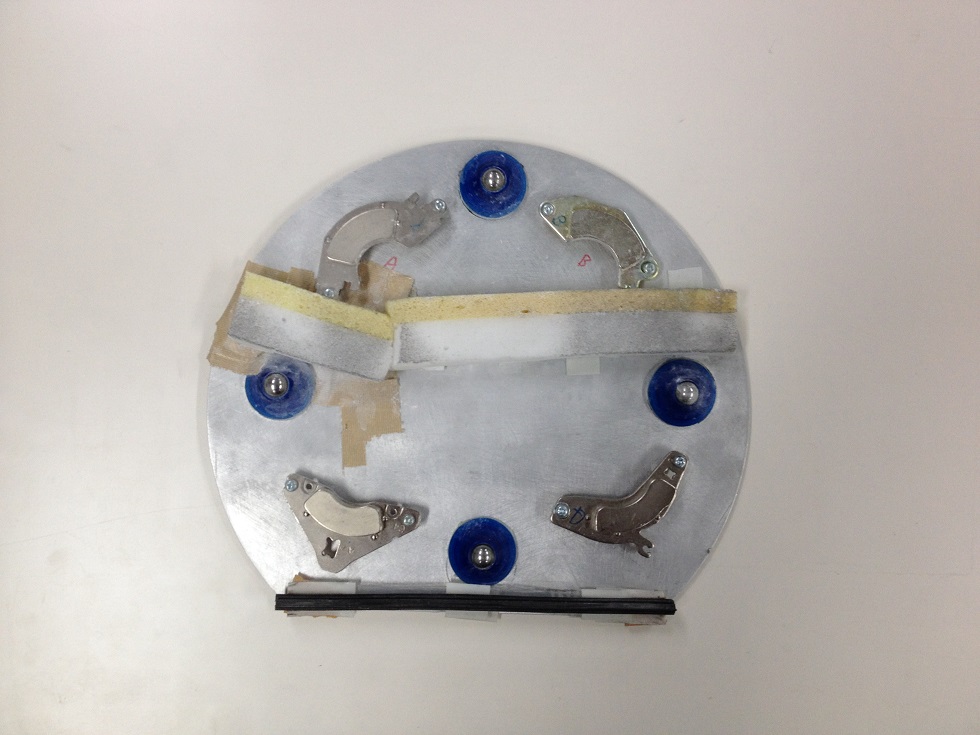
駆動側裏面
-
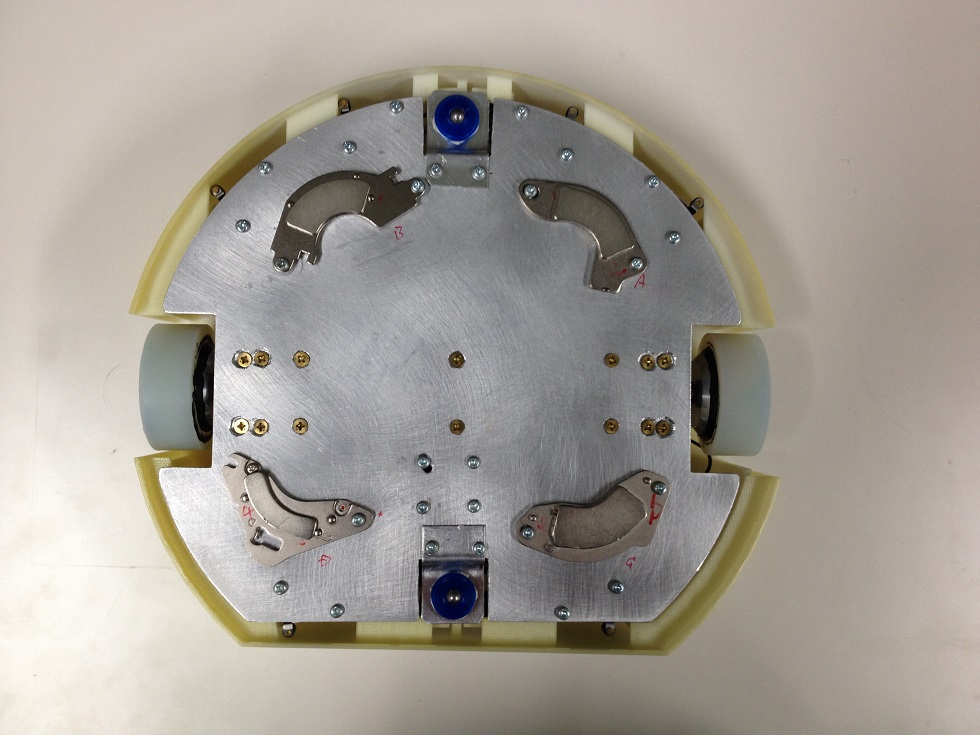
清掃側裏面
過去のページはこちら