研究紹介:ロボットグループ
窓ガラス清掃ロボット
研究概要
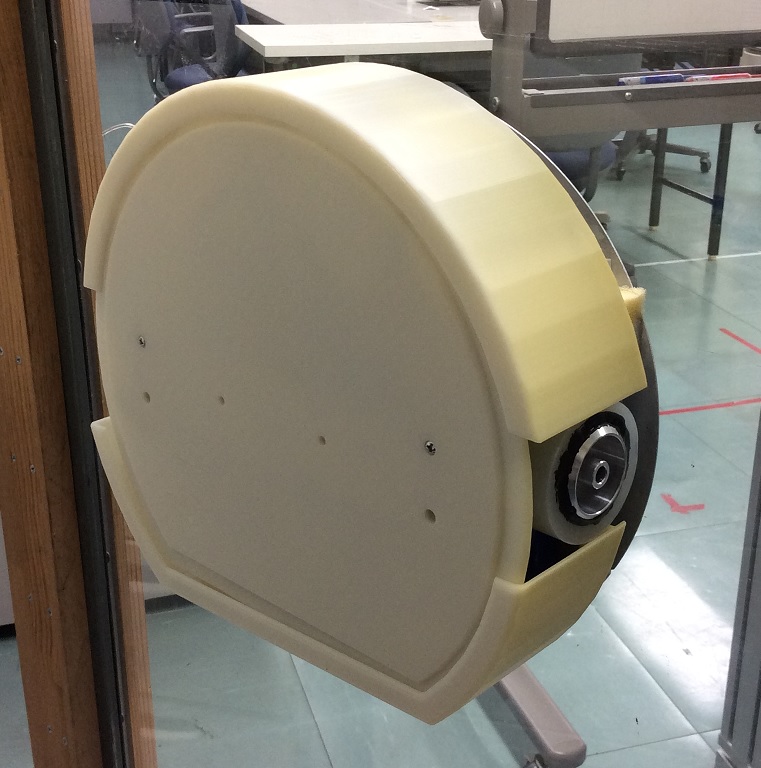
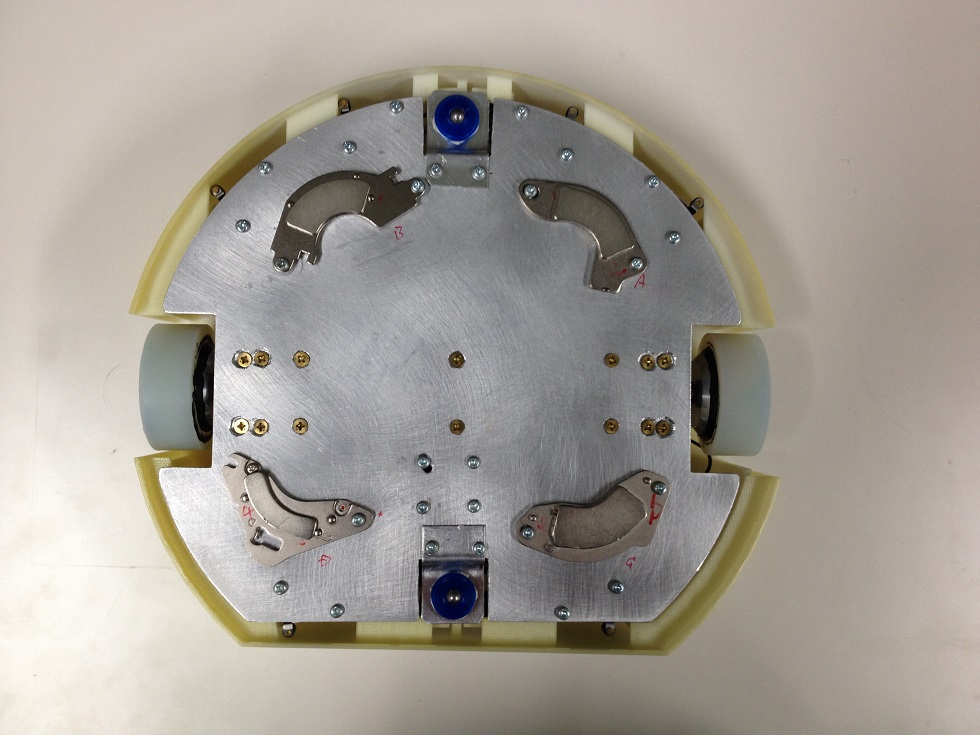
ビル窓ガラス清掃はほとんど人手に頼っているため,多大な経費を要し,かつ危険な作業となっています。そこで当研究室では九州大学P&Pプロジェクトの一つとして,窓ガラス清掃ロボットの研究開発を行ってきました。本研究では,特に開発した窓ガラス清掃ロボットが重力の影響下でも安定して走行するための制御則を提案しました。
-
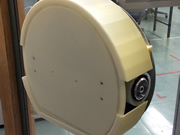
試作ロボット
-

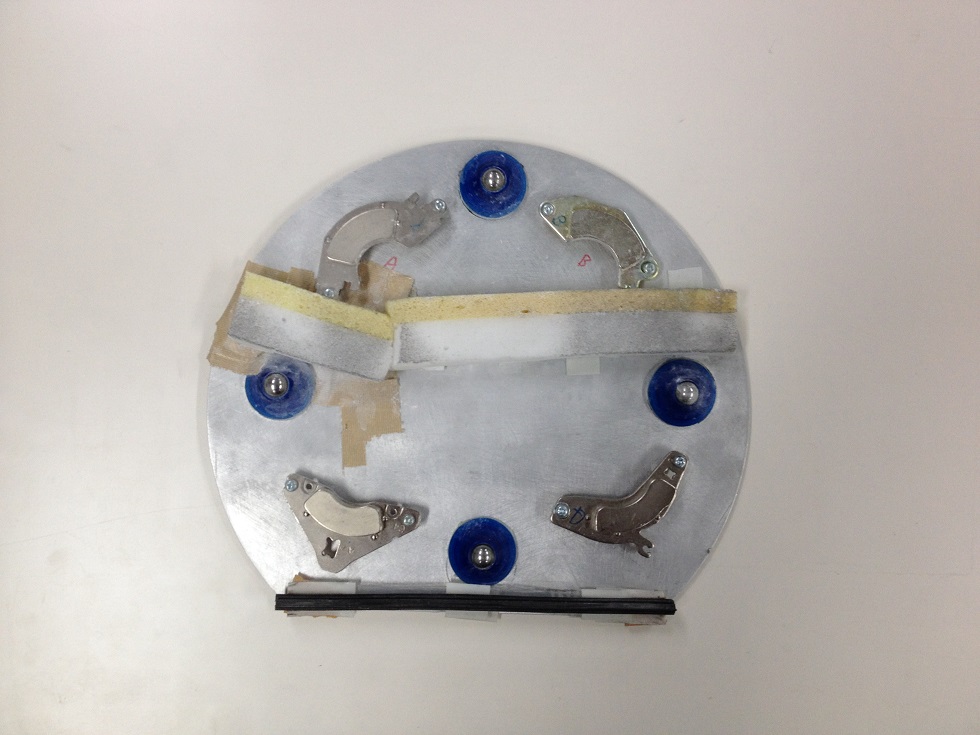
駆動側裏面
-
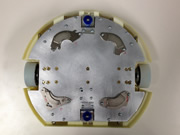
清掃側裏面
天井裏配線作業ロボット
研究概要
オフィスビルや商業店舗などで天井裏にネットワークケーブル等のケーブル類敷設作業が人手に よりおこなわれています。
しかし,この作業は狭隘で暗い作業環境なため,作業性がきわめて悪く,また,天井板を踏みはずすことで作業員落下の危険性があるなど,効率性と安全性の点で問題がありました。
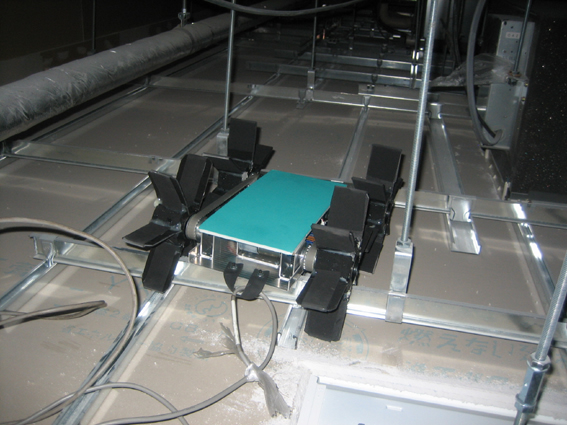
そこで,作業員がケーブルを直接敷設するのではなく,遠隔操縦により天井裏配線作業を効率的かつ 極めて安全におこなうことのできる"天井裏配線作業ロボット"を開発しています。
この研究開発は,福岡県ロボット産業振興会議の助成事業として,配線事業者の(株)テルテック,モータ製造事業者の(株)明和製作所とともに共同で実施したものです。
販売等に関しましては(株)テルテック (代表)廣中賢二 (福岡県糟屋郡粕屋町駕与丁2-11-15) 電話 092-273-1030 にご連絡ください。
-

天井裏の様子
-

天井裏配線作業ロボット

発表論文紹介
- 山本元司, 池田毅, "天井裏配線作業のための柔軟スポーク車輪型移動ロボット(柔軟スポーク車輪設計の考え方)", 第14回ロボティクスシンポジア講演予講集,pp.288-293, 2009.
- 特願 2008-243058.
スタッカークレーンの振動抑制制御
研究概要
スタッカードクレーンは,スタッカーと呼ばれる搬送用荷台を壁面に配置された立体収納庫の特定の場所に位置付けるための機械装置です。物流センターや図書館などで広く使われています。
このスタッカークレーンを高速で動作させるとき,荷台を昇降するマストが振動し,このことにより搬送作業に支障をきたすことが問題となっています。
そこで,マスト固有周期(走行中に変化する)に基づいた揺れをほとんど生じない動作制御手法を研究しています。
-

スタッカークレーンの例(西部電機(株)HPより)

移動ロボット&移動マニピュレータ
研究概要
工場における物の搬送には台車,人の搬送には車というように車輪式の移動台車は活躍の場が多く存在します。
さらに,最近では自律走行を行いながらビルの警備や案内を行うなど知的行動を兼ね備え走行しながら作業を行うロボットが開発されています。
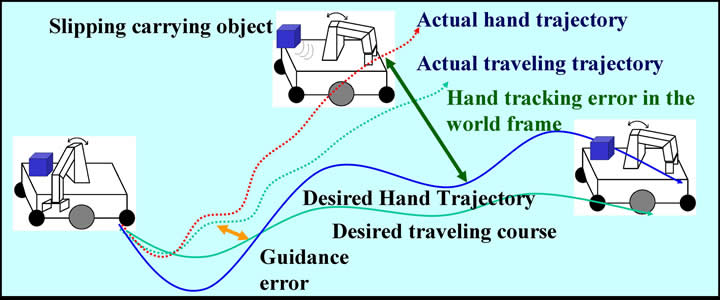
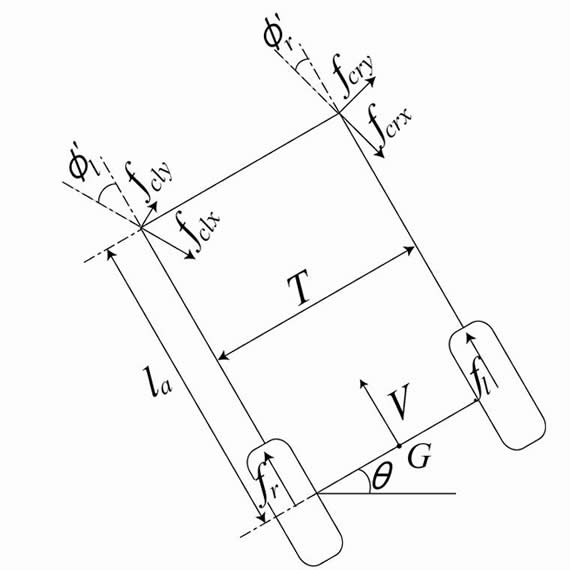
このような背景のもと,目標とする軌道を走行するための誘導制御法の提案を行ったり,車椅子で走行する際のふらつきを引き起こす原因の一つであるキャスタに注目してモデルを作成したりしてきました。
さらに,キャスタから受ける力学的影響や駆動輪のすべりの影響についてシミュレーションを行い,影響の大きさを調べ,ふらつきを抑えた走行方法を提案してきました。
今後はこのキャスタから受ける力学的影響,すべりの影響を考慮した上で安定した走行を行う方法について提案し走行実験を行っていきます。
-
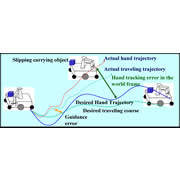
移動マニピュレータの走行誤差
-
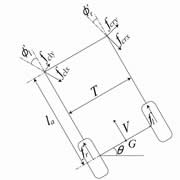
車椅子の2次元モデル
-

電動車椅子

発表論文紹介
- 池田毅, 黒田真弘, 山本元司, "車椅子型移動ロボットにおけるキャスタとすべり角によるコーナリングフォースの影響", ロボティクス・メカトロニクス講演会2008, CD-ROM, 2P2-D17, 2008.
- 矢崎靖啓, 池田毅, 竹内元哉, 見浪護, "PWS型移動ロボットの加速度制限付き最速誘導制御", 日本ロボット学会誌, Vol. 25, No. 4, pp. 535-544, 2007.
- M. Minami, T. Ikeda, M. Takeuchi, "Dynamical Model of Mobile Robot Including Slipping of Carrying Objects," International Journal of Innovative Computing, Information and Control, Vol. 3, No. 2, pp. 353-369, 2007
- 池田毅, 見浪護, "移動マニピュレータの誘導制御法の提案と評価", 日本ロボット学会誌, Vol. 25, No. 2, pp. 259-266, 2007.
ワイヤ拘束型柔軟アーム
研究概要
近年,医療ロボットや福祉用ロボットのように,人に近い領域で、もしくは人と接触しながら作業を遂行 することが必要なロボットの開発が重要となっています。
ロボットアームが人に近接もしくは接触しながら 作業をおこなうためには,接触時の安全性がきわめて重要です。
このようなロボットによる安全な動作の 実現のためには,ロボットの機構自体を柔らかく安全なものにすること,ロボットの制御を安全なものにすることの二つの手法が考えられます。
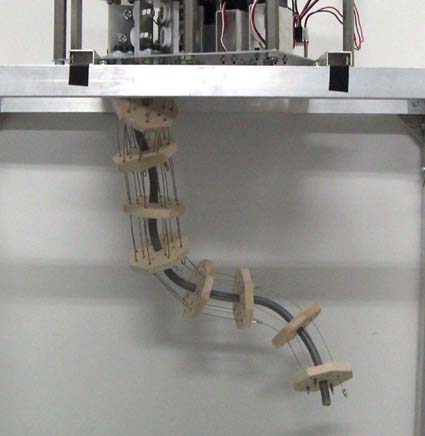
この本研究では故障時における安全性も考慮して受動的な柔軟性 を持つロボットアーム,特にロボット構造体に柔軟物を使用し,これをワイヤ拘束により連続的に変形制御 するcontinuum robot の機構開発とその形状制御手法を研究しています。
柔軟アームを3次元空間内で自在に形状制御するためには、ワイヤ操作量に対応する柔軟アームの変形を 知る必要があります。
これまでのワイヤ操作型 continuum robot の研究では重力を含めて外力に対する変形解析をおこなうことができませんでした。
しかし,柔軟アームによる作業の実現可能性やアームの人への接触時の安全性を考える場合は外力に対する変形解析は重要な意味を持ちます。
従って本研究では,continuum robot の一種であるワイヤ拘束型柔軟アーム機構について,重力の影響を考慮した上でワイヤ 操作量に対応するアームの変形解析手法を主に研究しています。
-

連続的で複雑な変形が可能な受動的柔軟アーム
-

人との接触時も安全な柔軟アーム(歯ブラシ動作:TV番組で紹介)

発表論文紹介
- Hyashi Yoshiaki and Yamamoto Motoji, "Shape Control of a Hose-Like Flexible Arm Constraining by Wires," Proc. of the 39th ISR International Symposium on Robotics (ISR2008), pp.40-43, 2008.
- 林喜章, 山本元司, "ワイヤ拘束によるホース型柔軟アームの形状制御", 日本機械学会論文集C編 第73巻732号,pp.2327-2334, 2007.
パラレルワイヤロボット
研究概要
走行クレーンや旋回クレーンなど各種クレーン装置が重量物搬送に用いられています。
これらは基本的には1本のワイヤにより懸垂物を懸垂するため,懸垂物が揺れやすい,懸垂物の姿勢制御 ができない問題がありました。
そこで,当研究室では走行クレーンを3つ組み合わせ,懸垂物を懸垂し, 3本のワイヤ長と3台のトロリ位置で懸垂物の3次元位置・姿勢を制御する"パラレルワイヤロボット"を 開発しています。
特に懸垂物の静的な力学拘束が不完全な"不完全拘束型パラレルワイヤ懸垂機構"を中心に 研究をおこなっています。
この機構では,懸垂物の上部のみからワイヤで懸垂制御おこなうため,作業空間が広く取れ,障害物との干渉の問題も少ない利点があります。
しかしながら,懸垂物の静力学拘束が不十分なため,他のパラレルワイヤロボットに比べ懸垂物が揺れやすいことが欠点でした。
そこで,ワイヤ懸垂系全体の動力学を考慮した制御手法を提案し,ほとんど揺れがなく,また 外乱に対しても速やかに目標軌道に収束する懸垂物位置・姿勢制御手法を提案しています。
この機構は,重量物搬送において懸垂物の姿勢制御が必要であり,かつそれができるだけ揺れない制御が 要求される状況においてきわめて有用であると考えます。
-

ワイヤ懸垂機構の例(コンテナクレーン)
-

当研究室で開発したパラレルワイヤロボット


発表論文紹介
- Hyashi Yoshiaki and Yamamoto Motoji, "Shape Control of a Hose-Like Flexible Arm Constraining by Wires," Proc. of the 39th ISR International Symposium on Robotics (ISR2008), pp.40-43, 2008.
- 林喜章, 山本元司, "ワイヤ拘束によるホース型柔軟アームの形状制御", 日本機械学会論文集C編 第73巻732号,pp.2327-2334, 2007.
歯科X線撮影訓練シミュレータの開発
研究概要
歯科診療の際,口内法X線撮影と呼ばれる撮影法が用いられています。口内法X線撮影法は,虫歯,歯冠,及び歯根の病変,歯周病などの診察に用いられる手法です。
撮影は以下の手順で行われます。
- 診断すべき歯に対して縦30mm× 幅40mm のフィルムを患者の口腔内に設置する。
- X線照射範囲を定めるX線照射器(以下,指示コーン)を歯とフィルムの位置関係を考慮した上で口外の適切な位置に設置する。
- X線を照射することで,フィルム上に歯の投影像が記録される。
この撮影法は,患者の骨格や体型などに合わせてX線量や照射方向の調整を行う必要があるため,個体差の撮影を大きく受けます。このため,熟練医でも撮影が難しく,撮影に失敗する例は少なくありません。
一方,口内法X線撮影法の一般的な指導は,
- X線撮影理論の習得
- 人骨入り模型を用いた撮影実習
- 外来患者を対象とした撮影実習
というステップを踏まなければなりません。
ところがX線を扱うため撮影実習は指導医の監視下で行うことが義務付けられています。
このため,卒業までに充分な実習時間を確保できていない歯学生もいます。
またフィルムの消費,現像作業などといった,コスト及び時間的に非効率的であることも訓練に影響をもたらしていると考えられます。
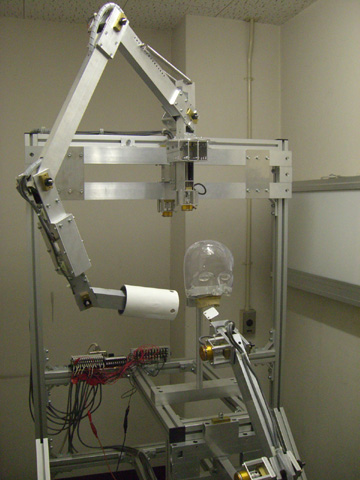
安全且つ効率的な訓練環境の実現を目的として,指示コーンとフィルムの位置付けを訓練要素とした訓練システムの開発を行っています。
-

現在の歯科X線撮影訓練環境
-

作成した訓練装置
-

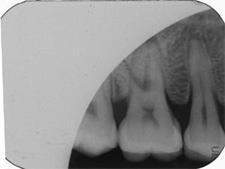
X線実画像
-
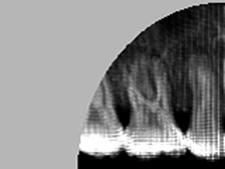
シミュレーション画像

発表論文紹介
- Y. Fujii, T. Tokuyasu, M. Yamamoto, K. Okamura, K. Yoshiura, Development of an intraoral radiographic training simulator, International Journal of Computer Assisted Radiography and Surgery, pp.539
- Tatsushi Tokuyasu, Yusuke Fujii, Motoji Yamamoto, Kazutoshi Okamura, Kazunori Yoshiura, A training simulator for intraoral radiography, Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.149-154
- 徳安達士,藤井優輔,山本元司,岡村和俊,吉浦一紀,口内法X線撮影訓練システムに関する研究,Journal of Japan Society of Computer Aided Surgery,Vol.10 No.2
歯科切削治療自動化のための被削物判別
研究概要
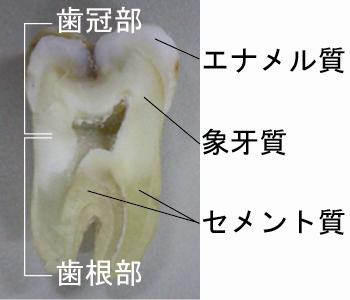
現在,日本人のう蝕歯保有率は非常に高い状態にあります。軽度のう蝕は短時間で治療可能ですが,痛みを伴う状態では治療に多くの時間をかけなくてはなりません。
また一方でう蝕治療は病変部の切削除去を行います。切削は手作業で行われるため歯科医の技術に大きく依存します. 治療に問題があった場合,二次う蝕の原因となるため切削には高度な技術が必要です。
本研究は切削治療の機械化により作業効率及び切削精度を向上させ,時間や場所を選ばない治療環境を提供することを目的としています。
機械化の最大の問題は,人の感覚を機械に認識させることです。人が視覚や触覚を利用しう蝕部位を特定する作業を機械によって実現しなければなりません。この問題を解決するために,我々は歯を削る際に生じる特有の音や振動に注目しました。切削時の振動を利用して被削物固有の情報を取得しう蝕部位を特定する手法について研究しています。
-

抜去歯と模擬切削器具
-
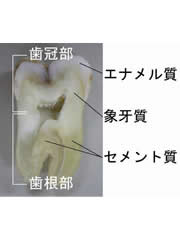
歯の構造

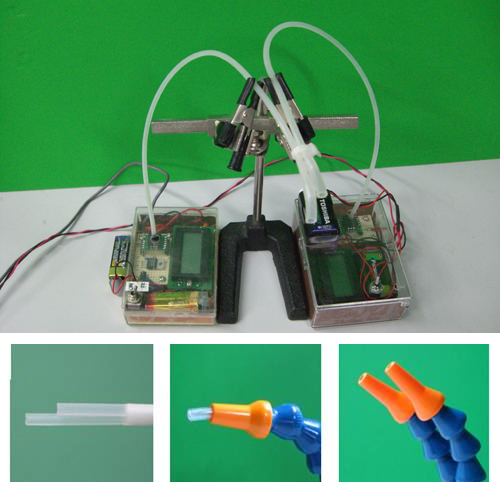
四肢障害者のための呼気圧インターフェース
研究概要
病気や事故によって手や体にハンディキャップを負った人が身の回りの物を操作する手段として口でスイッチを押したりレバーを動かしたりする方法,眼球や皮膚表面の動きをセンサで感知したりする方法,頭などの動きや呼気を利用する方法などがあります。これらの中から特に呼吸の圧力を利用した操作方法に注目し,その呼吸圧を利用したインターフェース装置の開発を行っています。そして,この呼吸圧インターフェースの応答特性を調べ,応用例として車椅子の操縦シミュレータを用いたインターフェースの制御実験,実際の電動車椅子の操縦を行う際の操作方法(ON-OFF型,積分型など)の検討・実験を行っています。
-

呼気圧インターフェース
-

走行シミュレーション
-

電動車椅子を用いた走行実験


発表論文紹介
- 山本元司, 池田毅, 佐々木善信, 曹鳳英, "電動車椅子のための呼気圧によるアナログ入力インターフェース", 日本機械学会論文集C編, 第75巻, 751号, PP. 703-709, 2009.
- M. Yamamoto, T. Ikeda, Y. Sasaki, "Real-Time Analog Input Device Using Breath Pressure for the Operation of Powered Wheelchair," 2008 IEEE International Conference on Robotics and Automation(ICRA), pp. 3914-3919, 2008.
- 池田毅, 山本元司, 佐々木善信, "呼気圧インターフェースを用いた電動車椅子の操縦", 第25回日本ロボット学会学術講演会, CD-ROM, 3J27, 2007.
- 曹鳳英, 山本元司, "電動車椅子操縦のための呼気圧による2次元実時間アナログ入力装置", 第12回ロボティクスシンポジア講演論文集, 1B4, pp. 52-57, 2007.